
Actuellement sur un projet nécessitant une mesure de rotation de moteur, autrement dit un tachymètre digital, me voilà à faire la liste des techniques qui sont à ma disposition, et de préférence avec les moyens du bord.
MÉTHODES DISPONIBLES
Les possibilités que j'entrevois sont les suivantes:
1 - Capteur à infra-rouge:
Deux types de dispositions
- Émetteur/Récepteur placés cote à cote sur la partie fixe, la rotative comprenant un élément réfléchissant. Chaque passage de la partie réfléchissante fera réagir le récepteur.
- Émetteur/Récepteur placés face à face sur la partie fixe, la rotative comprenant un trou sur un disque. Chaque passage du trou laissera passer le faisceau de l'émetteur qui permettra ainsi de faire réagir le récepteur.
2 - Contact mécanique:
Un circuit ouvert sur la partie fixe, se fermera à chaque passage d'une lamelle fixée sur la partie mobile.
3 - Capteur magnétique (Effet Hall):
Un capteur dit à effet Hall, détecte le passage d'un aimant, et réagit.
J'élimine d’emblée la solution 2, qui induit trop d'inconvénient.
Frottement, bruit, usure, éventuellement inertie mécanique selon le système adopté.
La solution 3 me semble la plus adaptée au montage sur lequel je planche, pour des raisons de mise en œuvre.
N'ayant pas de capteur en stock, et l'idée d'attendre la réception d'une commande , fait souffrir mon impatience à tester.
Quant à me déplacer afin d'en acheter un auprès du revendeur le plus proche de chez moi (une bonne heure de trajet) est à proscrire à 2 heures du matin...
grmbleuh!! (bruit sourd de mécontentement)
RÉCUPÉRATION/RECYCLAGE
Me rappelant avoir lu ça et là que la plupart des moteurs brushless comportaient un tel dispositif, me voilà à la quête d'info. me permettant de mettre la main sur l'un d'eux, avec ce que j'ai sous la main.
Eureka!
Moteur de CD-Rom ou encore de ventilateur de PC.

Je cannibalise un vieux lecteur de CD-Rom, je trouve ces fameuses petites puces qui sont au nombre de trois, dissimulées sous la gangue métallique du moteur plat.
Mais après renseignement sur le net, ne conviennent pas tout à fait à mon usage, ou alors nécessitant quelques manipulations électroniques que je ne souhaitais pas, pour le moment, effectuer.

Vient le tour du ventilateur d'une vieille alimentation PC HS.

Une rapide recherche du datasheet afin de connaitre les caractéristiques du modèle que j'ai,
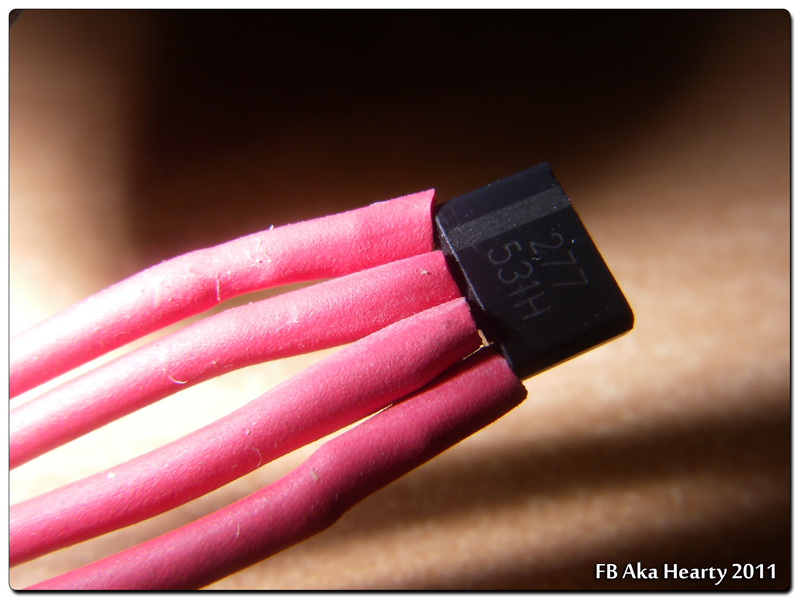
Il n'y en a qu'un, mais celui-ci correspond parfaitement à ce que j'en attend, de plus dans un boitier plus manipulable en cette heure tardive.
Du CMS à 4 heures du matin, autant attraper une aiguille avec des moufles. 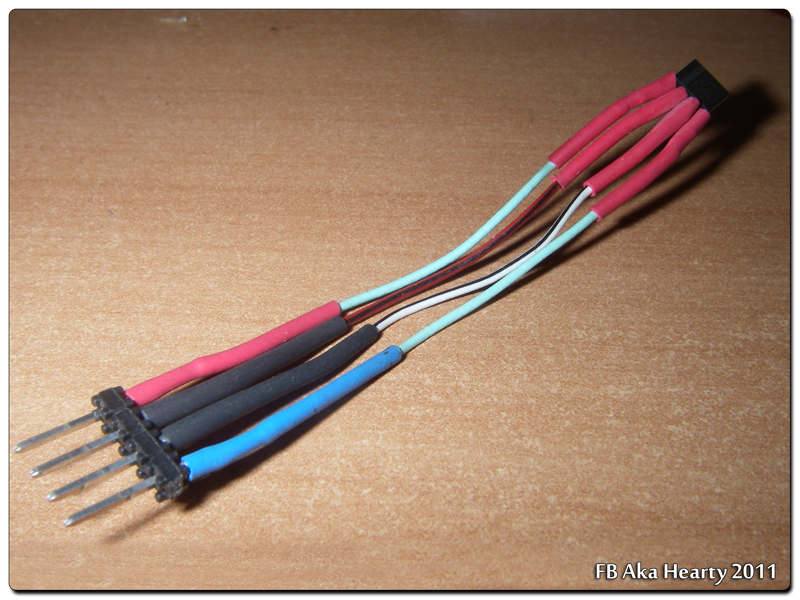
Le composant habillé pour une manipulation plus aisée sur platine d’essais, et pour son usage final ne manquera plus qu'à être inséré sur un support adéquat.

Mise en application de celui-ci afin de confirmer que son fonctionnement correspond bien à ce que j'en attend.
Le schéma de test issue des spécifications du datasheet (Section circuit test)
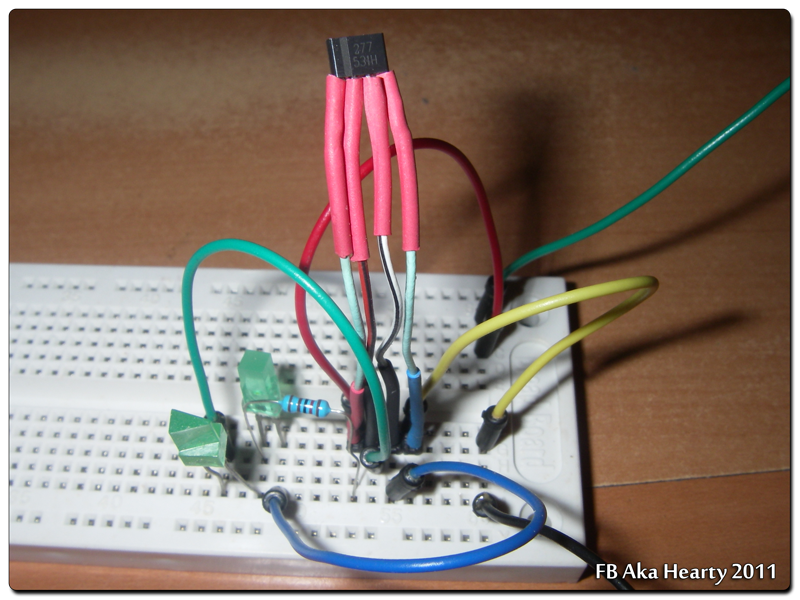
Après la théorie, mise en pratique sur LABDEC histoire de voir comment réagit le capteur.
TEST DE FONCTIONNEMENT
En présence d'un aimant le capteur réagit comme il se doit.
Les deux sorties ont un état inversé.
MISE EN PRATIQUE
Passons maintenant à la réelle mise en pratique de l'expérimentation.
Le but premier de ceci étant la mesure de vitesse de rotation d'un moteur équipé de cette sonde.
Une fois encore un PIC16F876A sera sollicité pour la simple raison qu'une LABDEC est pré-cablée.
Je n'aurais donc qu'à ajouter les éléments constituant ce projet, à savoir la sonde et un afficheur LCD.
Le moteur sera tout simplement celui d'un disque dur mis au rebut par l'évolution galopante des Gigaoctets qui rendent rapidement obsolète un matériel acheté il y a seulement 3 ou 4 ans.
L'ère du Giga est passé celui du Téra commence, puis viendra le Pétaoctet puis le Zettaoctet... Exaoctet... Yottaoctet... pardon, je m'égare, parce que d'ici là je serais certainement sorti de la matrice.
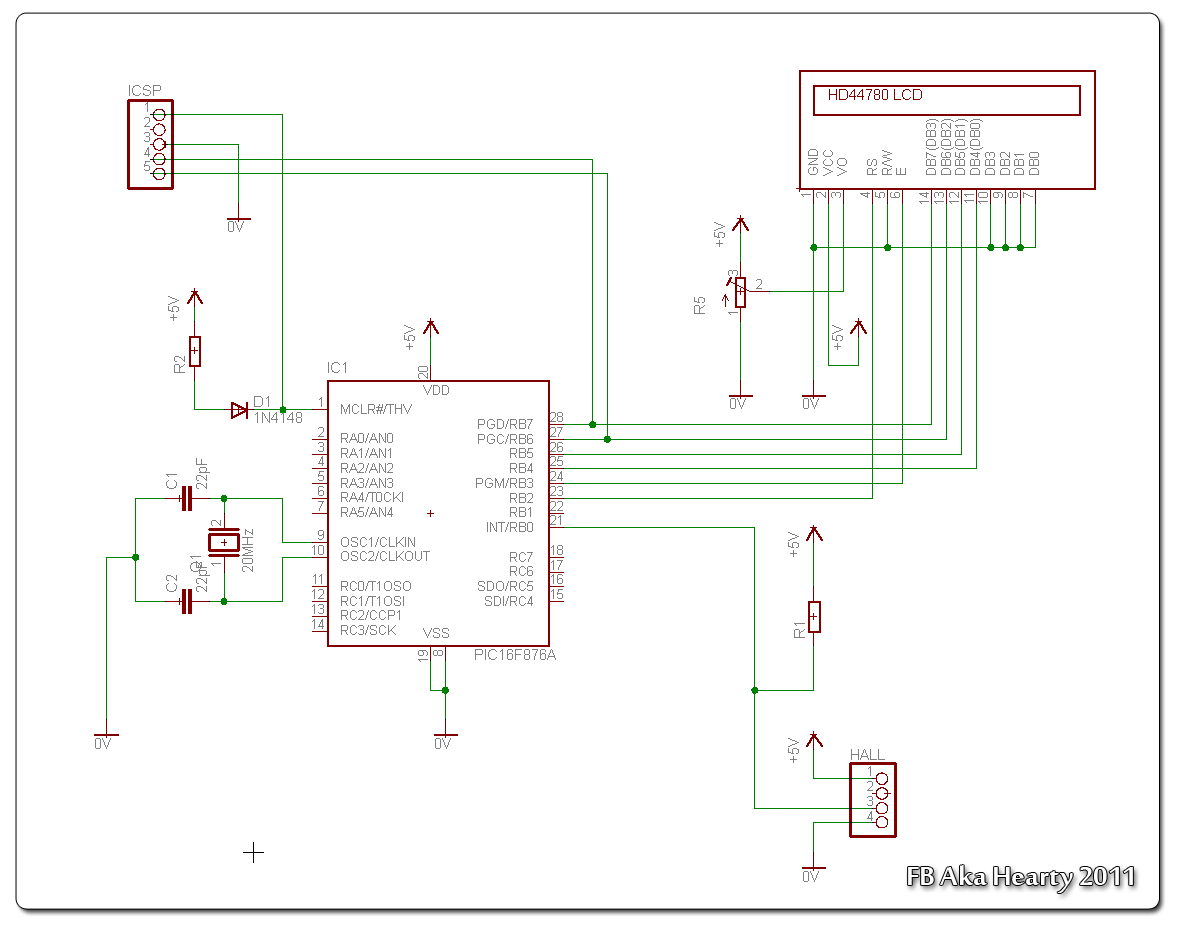
Voici donc, le schéma du tachymètre, qui ne présente aucune particularité.
La sonde sera connectée au port B0 permettant le déclenchement d'une interruption en natif.
NB: Petite omission sur le schéma, les deux résistances font 10K (Les observateurs l'ont tout de même remarqué sur les photos. )
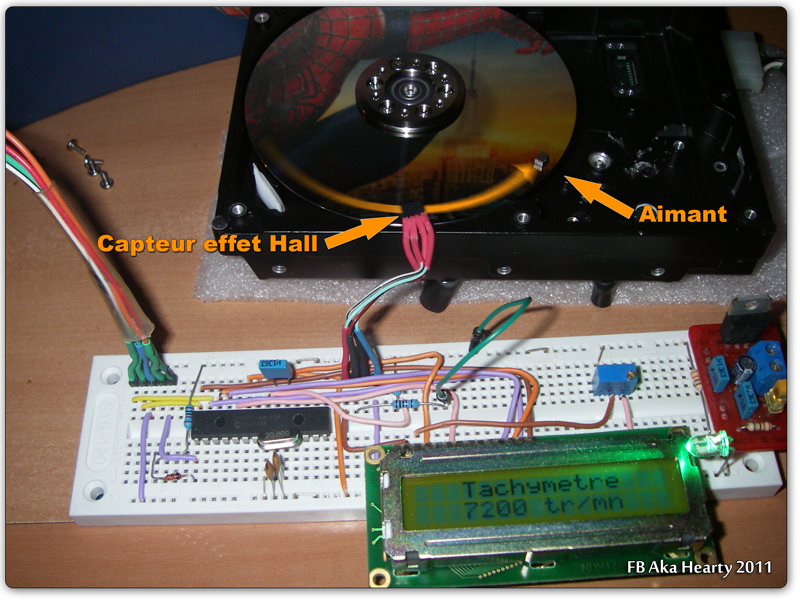
Le disque dur dont les entrailles sont vidées, ne laissant que le plateau fixé au moteur et la platine électronique sous le disque permettant le contrôle de rotation du moteur.
Sur ce plateau, en bordure, un petit aimant est fixé à la glu.
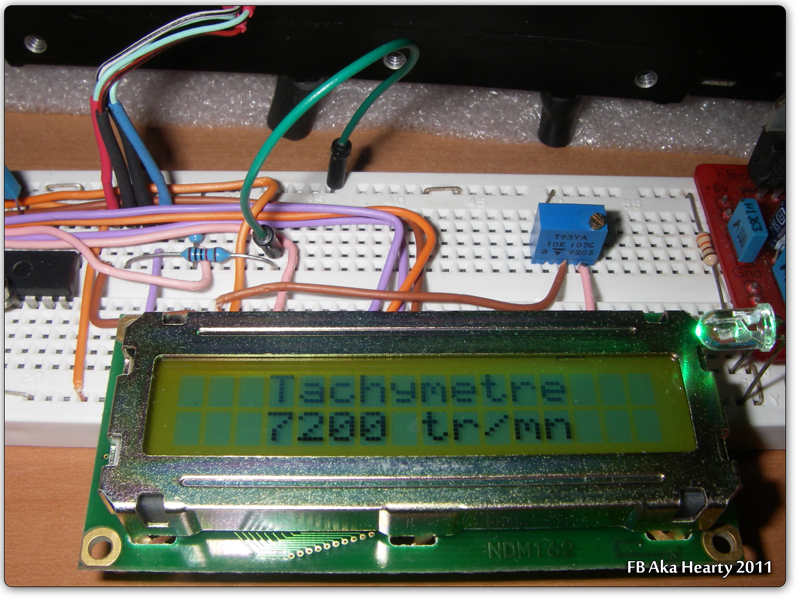
Le disque est donné pour une vitesse de rotation de 7200 tours par minute...
...que l'on peut confirmer avec précision.
Le code source du tachymètre digital
La notion principale à retenir, est qu'une interruption survient sur le PORTB.0, ici générée par le capteur à effet Hall, donc chaque tour, le µcontrôleur est renseigné, de là en utilisant le Timer0 je peux effectuer un décompte m'indiquant combien de tour par seconde, et par extension par minute.
Voilà donc cette expérimentation finie.
Un montage utilisant cette base fera l'objet d'un prochain article et permettra un rendu du plus bel effet.
;)
57 commentaires :
bonjour,
auriez vous les fichiers nécessaires à la réalisation de ce montage? Je souhaiterai l'utiliser pour la vitesse de rotation d'un moteur electrique...
Bonsoir,
Qu'entendez-vous par 'les fichiers', parce que tout est publié, schéma et code source, dans l'article.
Merci de votre intérêt,
A bientôt,
;)
Bonjour et merci pour votre réponse. Je voulais savoir s'il y avait possibilité de télécharger directement le schéma pour éviter toute erreur. D'autre part, y a t il possibilité de modifier le programme pour afficher une vitesse de défilement sur la deuxième ligne plutot que le mot "tachymètre"? Car cela je ne suis pas expert... Merci
Bonsoir,
Comme je l'ai dit précédemment le schéma est sur la page de l'article, cliquez bouton droit de la souris sur l'image et "enregistrer sous...".
Pour la modification d'affichage vous êtes libre d'afficher ce qui vous convient.
Le code source est sur l'article également.
Procédez à la modification et compilez le fichier sous MikroC pro ici pour la dernière version :
http://www.mikroe.com/downloads/get/29/mikroc_pro_pic_2012_v580.zip
La version de démo est gratuite, elle permet de compiler jusqu'à 2K de code, ce qui est plus que suffisant pour la plupart des codes publiés sur le blog.
la modification d'affichage se situe ici:
Lcd_Out(1,4, "Tachymetre"); // Afficher le message
Lcd_Out(2,9, "tr/mn "); // Afficher le message
Le mot tachymètre s'affiche en 1,4
Ce qui veut dire, ligne 1, 4 ième colonne.
J'espère que cela vous aidera.
;)
Bonjour,
désolé pour ma réponse tardive... Je début en programmation de PIC donc je préfère me tourner vers vous... Est il possible d'afficher la vitesse de rotation du moteur sur une ligne et, sur une autre ligne, cette même vitesse convertie en vitesse de défilement avec mon diamètre de poulie?
Bonsoir,
Pour répondre à la question, oui tout est possible.
Ce ne doit pas être difficile d'afficher la vitesse tangentielle de la poulie.
Je ne promet rien, mais je regarderais " si " j'ai un moment.
A bientôt,
;)
pouvez vous m'aidé svp je veux réalisé un capteur pour mesurer un champ magnétique a l'aide d'une bobine !!!
Bonsoir,
Je ne maîtrise pas suffisamment le domaine pour vous apporter une quelconque aide.
Cependant si cela peut vous aider, las capteurs utilisés dans le moteur d'un lecteur de CD-Rom par exemple, sont de type analogiques, voir la photo 2 de l'article (ils sont au nombre de trois).
Je présume que ce type de modèle conviendra pour une mesure d'intensité magnétique.
Vous trouverez sur le net les renseignements qui vous aideront certainement.
Par exemple ici:
http://michel.hubin.pagesperso-orange.fr/capteurs/phys/chap_m3.htm
J'espère que cela vous orientera dans vos recherches.
Si vous avancez dans vos expérimentations, n'hésitez pas à partager vos infos.
A bientôt,
;)
Méééérci ;)
Salut
Mon projet est une horloge numérique. J'ai écrit un programme qui consiste à afficher l'heure pour 10 secondes puis la date pour 10 secondes puis la température pour 10 secondes.j'ai utilisé une pic 16f877 , 6 afficheurs 7 segments , 6 74HC595 et 3 bouton poussoir pour le réglage de temps.j'ai écrit une fonction void interrupt() ou va se passer le réglage quand j'appuie sur le bouton de réglage. mon problème maintenant ce que quand je compile le programme on m'indique qu'il y a une problème avec la commande spi_write dans la fonction interrupt malgré que si je supprime cette fonction alors là le programme exécute cette commande correctement sans faute. l'erreur m'affiche le message suivant :
Not enough RAM for call stack __Lib_Math.c
Reentrancy is not allowed: function 'send_data' called from two threads NewUnit.c
Reentrancy is not allowed: function 'SPI1_Write' called from two threads __Lib_SPI_c345.c
est-ce que vous pouvez m'aider s'il vous plait??
( si vous avez besoin de mon code source alors je peux le vous envoyer.
Merci beaucoup :)
Bonjour,
Navré les messages ne me disent rien du tout.
Si vous programmez en MikroC, le mieux est de poser la question sur le forum de MikroElektronica.
http://www.mikroe.com/forum/
;)
merci pour cette lecon tres riche ainsi que pour le code source tres explique. je suis sur un projet d un taxi-metre pour gerer 3 clients separement est ce que je peux facillement detourner ce code source de compteur kilometrique pour mon taxi-metre? merci
Bonsoir,
Dans l'absolu, oui tout est possible.
Pour établir la relation de distance parcourue, il faut définir la circonférence de la roue du véhicule, ainsi chaque tour compté donnera la distance parcourue à chaque rotation.
Circonférence = PI x Diamètre
Donc si la roue à un diamètre de 0.6 mètres
0.6 x 3.1416 = 1.885 mètres sont parcourus pour chaque tour de roue.
Ensuite il est aisé d'extraire cette valeur et d'en faire ce que l'on veut, y compris afficher le résultat prix/Km sur l'écran.
N'hésitez pas à me montrer votre projet fini.
A bientôt,
;)
Bonjour,
Je dois réaliser un compte tour directement sur un moteur Brushless, est-ce alors nécessaire de réaliser ce circuit en entier ou y a-t-il un autre moyen?
Bonjour,
quelque soit la méthode utilisée pour compter les tours
il y aura nécessairement un module de captation
et un module de comptage -mémoriser et/ou afficher-
C'est, d'après moi, la méthode dont le circuit sera le plus simple tout en permettant un traitement complexe du résultat.
Mémorisation, affichage, conversion etc...
Un PIC plus petit est parfaitement envisageable
si c'est une histoire d'encombrement , voire du CMS.
En faisant une rapide recherche sur un moteur de recherche on y trouve différents moyens de mettre en place ce type de capteur.
Exemple
A bientôt,
;)
tour/minute , comment savoir le Mille à l'heure?
A+!
marC:)
Bonjour,
Mille à l'heure...? c'est une unité de quoi?
Quoiqu'il en soit, cela dépend de ce que la rotation mesurée engendre comme mouvement.
Un exemple de calcul est donné dans une réponse -juste au dessus du commentaire de Gautier-
;)
Bonjour,
Grâce à quel logiciel vous avez programmé?
J'essaie de réaliser avec MPLAB v8.90 mais j'ai beaucoup de mal avec les registres etc..
Bonsoir,
Je programme sous MikroC pro qui est, de mon point de vu, infiniment plus convivial que MPlab.
La version téléchargeable sur le site de MikroElektronika permet en version de démo, de compiler des programmes ne dépassant pas les 2Ko.
Ce qui vous permet de compiler la plupart des programmes que je présente.
De plus il comporte une flopée de bibliothèque facilement utilisable, permettant de gérer la plupart des périphériques que l'on trouve couramment autour des PIC - voir la doc et les exemples très bien faits -
Tenez moi au courant.
;)
Je vous tiens au courant alors:
J'ai réalisé le montage sur ma Labdec, avec un PIC18f1320 programmé sur MPLAB (pas d'ICSP, et seulement un résistance qui sort du MCLR du pic), j'ai donc du modifier le programme pour qu'il concorde. J'alimente la plaquette et rien ne se passe pour l'instant. Je ne sais pas encore d'où ça viendrait.
Bonjour,
Le principe de l'application reste simple, chaque fois que RB0 reçoit une impulsion le comptage est incrémenté.
Vérifiez donc que RB0 prend bien en compte les interruptions, quitte à les produire manuellement, sans le capteur Hall.
Je n'ai pas compris ce que vous avez mis entre parenthèses.
;)
Ben en fait, je n'utilise pas d'ICSP comme dans votre schéma, et j'ai mis uniquement une résistance en entrée du MCLR de mon pic (donc pas de diode).
Mais lorsque je mesure la tension aux bornes de celle ci, j'ai 0V et je pense pas que ça soit normal
Bonjour,
l'ICSP ne sert absolument pas au fonctionnement du montage.
C'est uniquement pour programmer le PIC in situ.
Juste pour savoir, comment avez-vous chargé le programme dans le PIC?
;)
J'utilise un ICD2 avec MPLAB pour le charger, comme je ne sais absolument pas me servir de MikroC, ni si c'est possible d'utiliser l'ICD2 avec ce logiciel
Bonsoir,
Tout est possible.
Comme suit:
Lien forum MikroElektronika.
Une meilleure prise en compte se ferait donc en utilisant le fichier 'cof' , fichier cof qu'il faut générer en suivant la manip du forum.
Je n'ai jamais utilisé d'ICD2, mais cela reste un mode standard pris en compte par toutes les solutions logicielles tournants autour des PIC, dans le cas présent, MikroC.
Lors de la configuration du projet, il suffit de choisir au départ, ou par la suite en éditant le projet, ICD en tant que debugger.
voir le visuel
MikroC est non seulement très intuitif, mais extrêmement documenté.
Sur le forum, je crois que tout y a été abordé un jour ou l'autre, on y trouve vraiment tout.
- wah! j'ai l'impression d'être une brochure publicitaire pour MikroC :-D -
;)
Oui mais ça devrait être censé marcher avec mon programme et mon montage, j'ai fait un programme simple juste pour afficher quelque chose et même là le LCD reste allumé avec des carrés noirs. J'ai eu beau refaire 2-3 fois le montage, c'est toujours pareil :/
Du coup je regarde si ma LABDEC n'a pas un soucis, je mesure la tension à plusieurs endroits. Aux bornes de OSC1 et OSC2 du pic, j'ai 2.5V aux bornes d'un condensateur de 22pf, mais j'ai 0v aux bornes du 2eme. C'est peut-être pour ça... Mais j'en doute fortement, parce que je ne sais pas quelle tension on est censé trouver.
Je suis désolé de vous poser soucis!
Bonsoir,
Les carrés noirs ne sont pas forcément un mauvais signe,
avez-vous réglé le contraste avec la résistance ajustable R5 sur le schéma?
Rarement le LCD est réglé au bon contraste au démarrage.
J'avoue n'avoir jamais pris de mesure aux bornes du quartz et ses condensateurs, je ne saurais répondre sur les tensions censées être là.
Ne vous en faites pas, cela ne me pose pas de problème de vous répondre.
;)
J'oubliais,
les LabDec made in China sur Ebay, présentent toutes une caractéristique particulière sur les rails d'alimentation.
Le rail n'est pas continu d'un bout à l'autre de la platine.
Regardez ici si vous regardez attentivement sur toutes mes LABDEC, je place des straps tous les 3 ou 4 blocs de 5 trous sur les rails + et -.
;)
Non tout est bon au niveau de la LabDec, aucune idée vraiment..
Je vais tenter de changer de PIC, on verra ce que ça va donner! J'espère que ça va changer. C'est fou parce que ce n'est absolument pas difficile à réaliser pourtant, même mon prof n'a pas trouvé d'où ça pourrait venir.
Je vais refaire entièrement le montage avec le pic18f452
Bonjour,
Et pour le contraste?
;)
C'est bon ça marche nikel avec celui là! (C'est à n'y rien comprendre)
Maintenant je bataille un peu avec les interruptions mais ça va le faire! :)
Tant mieux, ça avance.
;)
J'y suis presque! Mon compteur marche nikel quand je suis en mode Debugger sur Mplab, mais bizarrement il ne fonctionne pas très bien en programmer, il fonctionne pour des fréquences > 100Hz, mais en dessous ça donne n'importe quoi ^^ (J'ai branché un GBF sur RB0 pour simuler les fronts montants d'un aimant)
Bonjour,
étrange comme comportement, c'est à dire qu'en mode debugger, le comptage s’effectue en deçà des 100Hz, mais pas en mode autonome?
Pensez à poser un condensateur de découplage très près des broches d'alimentations du PIC, d'une valeur de 100nF, la sensibilité des µcontrôleurs provoque parfois des comportements erratiques qui se résolvent avec un condensateur de découplage.
Maintenant que le circuit fonctionne, vous constatez à quel point le principe est simple finalement.
Le contrôle à l'aide d'un GBF est une bonne méthode.
Si vous avez des images n'hésitez pas, j'aime les images.
;)
bonsoir HeartyGFX
j'ai une question concernant le moteur du disque dur comment le faire tourner avec un PIC? et comment faire contrôler sa vitesse
merci pour la réponse
cordialement
Bonjour!
Je reviens vers vous pour vous annoncer que j'ai réussi à réaliser mon projet!
Le compte-tour marche nikel avec le p18f452, j'ai aussi réalisé une communication UART entre le PIC et l'ordinateur pour récupérer les informations voulues.
Je vous remercie de votre aide en tout cas, elle m'aura été précieuse!
PS: Sur quel logiciel réalisez vous vos schémas électriques? J'en cherche un pour pouvoir faire les miens pour mon rapport de stage
Bonsoir,
Lamsalli, Un moteur de disque dur se pilote comme un moteur pas à pas.
Selon le modèle, il se pilotera comme un moteur unipolaire, ou bipolaire.
Pour le déterminer, il suffit à l'aide d'un Ohm-mètre de tracer quel type de configuration de bobine est utilisé, afin de piloter en unipolaire ou en bipolaire, selon.
Le plus souvent les disques sont cablé en Unipolaire plus facile à piloter, moins d'électronique je veux dire.
Un exemple de pilotage de disque dur
Gautier, heureux d'avoir pu vous aider dans la réalisation de votre projet.
Si vous publiez votre application sur le net, il serait sympa d'en indiquer le lien, cela pourrait servir à d'autre un jour ou l'autre.
J'utilise deux logiciels pour la conception de mes schémas,
- Proteus ISIS principalement pour réaliser des simulations et tester mes codes avant de câbler en réel -sur les schéma que je publie, le fond de l'image est beige-
Et j'utilise Eagle, lorsque je réalise le typon, en premier lieu par habitude, et parce que Eagle me permet de prévisualiser le circuit en 3D photo-réaliste que l'on peut voir sur beaucoup de mes publications. Les schémas de Eagle ont un fond blanc.
Sur cette présente page, le premier schéma est sous Proteus, et le second sous Eagle.
;)
Je viens de télécharger Eagle, mais je ne comprends pas tout.
Où je peux retrouver tout ce qui est composant etc?
Bonjour,
L’icône en forme de porte logique avec un pointeur de souris, libellé "Add" donne accès à la bibliothèque de composant.
Pour les composants passifs courants tels que résistances, condo etc.. il y a un dossier "RCL"
Une recherche type "tuto eagle" sur youtube par exemple, permettra de comprendre le fonctionnement de ce logiciel.
;)
bonjour,
1) svp pourquoi dans la compilation du programme sur mikro C il y a un erreur dans i ?
2) est ce que le shéma de simulation de tachymetre est complet ?
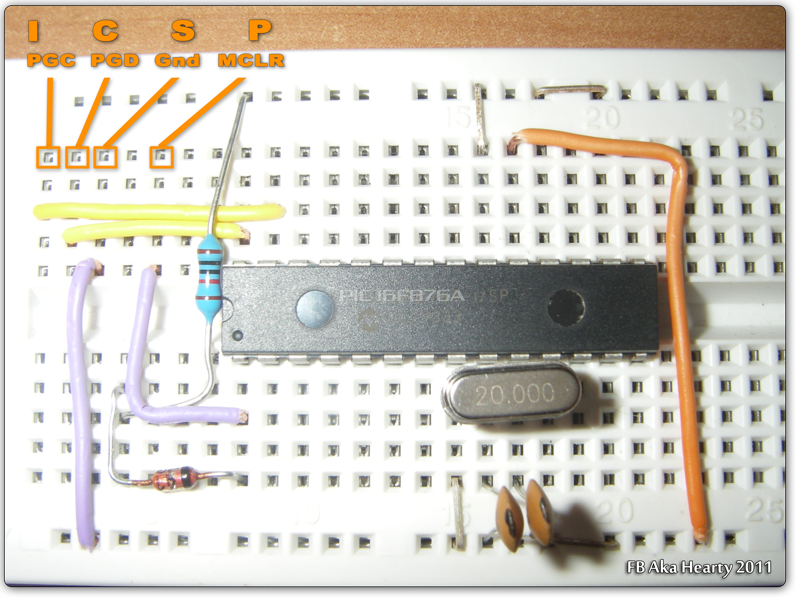
3) la pin 2 de connecteur ICSP pour quoi n'est pas connecté avec +5V ?
4) la pin 2 de capteur effet hall pourquoi est vide ?
SVP répond à moi et merci :)
Bonsoir,
1 - Vous pouvez effacer cette ligne -celle du i- elle ne sert à rien, c'est une variable qui me servait lors de mes tests, j'ai rectifié la page elle n'apparait plus.
2 - Le schéma est complet.
3 - Le +5v de l'ISCP ne me sert pas, j'alimente le montage en externe.
4 - Si vous regardez le Datasheet de ce composant vous constaterez que cette pin est la valeur complémentée -inversée- de la pin 3. elle ne sert donc pas dans ce cas de figure.
J'espère avoir correctement répondu à vos interrogations.
A bientôt,
;)
ahh d'accor merci :)
3) comment tu alimentes le montage en externe ?
4) dans le datasheet du ATS 277 , je trouves la pin 2 (DO) et la pin 3 (DOB) , c'est à dire que le pic (RB0) est relié avec la pin 3 (DOB)?? .
5) est ce que ce montage capte quel vitesse du disque dur ?
Svp , l'organigramme explicatif de cette carte :)
Bonjour,
3 - Par une alimentation 5V externe.
Sur l'image de la section "mise en pratique" on voit sur la platine d"essais, l'alimentation du PIC se faire par le rail du haut (le +) et le rail du bas (le -).
2 - oui, c'est bien cela.
5 - je ne comprends pas bien la question...
Pour explication, si ce n'est pas déjà clair,
le capteur compte chaque passage de l'aimant collé sur le plateau du disque dur.
Donc chaque passage = une rotation.
Par le code nous déterminons combien de passage par seconde, puis par minute.
Et enfin, toute information relative à ce montage est présente dans l'article.
Il n'y a pas d'organigramme, quoique l'on peut considérer l'avant dernier paragraphe de l'article comme étant un organigramme textuel, puisqu'il schématise parfaitement le principe de fonctionnement du montage.
Merci de votre intérêt,
à bientôt,
;)
bonsoir :)
1)Dans le datasheet (ICSP) je trouves la pin 2 du connecteur ICSP correspond à + VDD , mais dans le montage la pin 2 est vide , c'est à dire elle n'est pas relié avec + 5V .
2) mon question , est ce que le capteur peut capter la vitesse du moteur à 2500 tr/min , 3000 tr/min et n'importe quel valeur ?
Bonjour,
1 - Il faut lire complètement le Datasheet sur l'ICSP pour comprendre le fonctionnement.
Le courant fourni par l'ICSP est trop limité pour alimenter un montage in situ, donc on alimente en externe,
sauf s'il l'on veut programmer uniquement le PIC, ou que l'on isole le PIC dans le montage.
Je ne comprends pas ce qui vous pose soucis.
2 - oui.
;)
1) regardez ce shéma aussi ,
http://www.google.tn/imgres?imgurl=http%3A%2F%2Fimage.pinout.net%2Fpinout_20_pin_files%2FICSP.jpg&imgrefurl=http%3A%2F%2Fimage.pinout.net%2Fpinout_20_pin_files%2F&h=366&w=838&tbnid=NMhrt9AHpbIryM%3A&zoom=1&docid=GfrxhYz49FOR1M&ei=64a9U_-lL8jA7AaGyoHICQ&tbm=isch&ved=0CCIQMygDMAM&iact=rc&uact=3&dur=395&page=1&start=0&ndsp=15
Bonsoir,
Si vous tenez absolument à brancher cette broche,
faites le.
Que cherchez-vous à démontrer?
;)
moi je suis entrain de chercher et de fabriquer une tournette (spin coating).
1) quel est le role de connecteur ICSP ?
2) il faut utiliser un bloc d'alimentation +5V (regulateur 5 V, condensateur 10 uF, condensateur 100 nF) ??
Bonjour,
l'idée de l'ICSP est de pouvoir programmer le µcontroleur dans son environnement, sans avoir à sortir le PIC du circuit afin de le programmer seul.
On peut programmer le PIC dans son application à condition bien entendu de prévoir un accès aux broches nécessaires, soit : PGC,PGD,Gnd, MCLR.
Optionnellement, si le PIC est isolé, on peut utiliser l'alimentation fournie par le programmateur -VDD- mais en général, mieux vaut utiliser l'alimentation du montage dans lequel le µcontroleur est intégré.
Alimentation qui sera généralement constituée d'un régulateur 5 volts et de ses condensateurs de découplages.
Pour plus de détails, je vous invite à faire une recherche sur le net, qui déborde d'articles très complets sur le sujet.
Bon courage pour votre centrifugeuse.
;)
Bonjour,
Bilel, lorsque l'on dit, je vous invite à faire des recherches, cela signifie, je vous conseille de faire des recherches.
Google, vous aidera plus que je ne pourrais le faire.
A bientôt,
;)
Bonjour,
S'il vous plais j'aurai besoin de savoir où trouver des capteurs à effet hall omni directionnel en France. Je voudrais l'utiliser pour la détection d'ouverture des portes de mon domicile.
Merci.
Bonsoir,
réponse quelque peu tardive, désolé.
Je n'ai aucune idée où trouver ce genre de capteur,
d'ailleurs je ne savais même pas que cela existait en mode omnidirectionnel.
;)
Bonjour,
Est-ce que plusieurs interruptions simultanées sont possibles ?
Deux capteurs, chacun connecté à un débitmètre à engrenage afin de calculer le rapport de dosage.
Le capteur déclenche une interruption á chaque passage d'un dent de roue dentée.
Débit =2*volume d'un pas dentaire (volume entre deux dents successives) *fréquence des impulsions.
Rapport %=((débit A) /(débit A +débit B))*100.
Une alarme se déclenche en cas de dépassement de limite exigée (rapport exigé =20%(+-5%)).
Aidez moi svp, c'est urgent.
cordialement.
Bonsoir,
Je ne peux que répondre basiquement à votre question.
Oui il est possible de déclencher des interruptions en simultané.
On peut même utiliser des ports en entrées et affecter un déclenchement adapté.
Je ne peux vous en dire plus, c'est de l'ordre du fonctionnement normal d'un PIC.
Tout est indiqué dans les DataSheets.
A bientôt,
;)
Mrc pour le travail j'ai un mini projet comme ça ms avec vitesse maitre/seconde et mrc
Enregistrer un commentaire